Беспроводные сенсорные сети
Новейшие технологии беспроводной связи и прогресс в области производства микросхем позволили в течение последних нескольких лет перейти к практической разработке и внедрению нового класса распределенных коммуникационных систем — сенсорных сетей.
Беспроводные сенсорные сети (wireless sensor networks) состоят из миниатюрных вычислительно-коммуникационных устройств — мотов (от англ. motes — пылинки), или сенсоров. Мот представляет собой плату размером обычно не более одного кубического дюйма. На плате размещаются процессор, память — флэш и оперативная, цифроаналоговые и аналого-цифровые преобразователи, радиочастотный приемопередатчик, источник питания и датчики. Датчики могут быть самыми разнообразными; они подключаются через цифровые и аналоговые коннекторы. Чаще других используются датчики температуры, давления, влажности, освещенности, вибрации, реже — магнитоэлектрические, химические (например, измеряющие содержание CO, CO2), звуковые и некоторые другие. Набор применяемых датчиков зависит от функций, выполняемых беспроводными сенсорными сетями. Питание мота осуществляется от небольшой батареи. Моты используются только для сбора, первичной обработки и передачи сенсорных данных. Внешний вид мотов, выпускаемых различными производителями, приведен на рис. 1.

Рис. 1
Основная функциональная обработка данных, собираемых мотами, осуществляется на узле, или шлюзе, который представляет собой достаточно мощный компьютер. Но для того, чтобы обработать данные, их нужно сначала получить. Для этой цели узел обязательно оснащается антенной. Но в любом случае доступными для узла оказываются только моты, находящиеся достаточно близко от него; другими словами, узел не получает информацию непосредственно от каждого мота. Проблема получения сенсорной информации, собираемой мотами, решается следующим образом. Моты могут обмениваться между собой информацией с помощью приемопередатчиков, работающих в радиодиапазоне. Это, во-первых, сенсорная информация, считываемая с датчиков, а во-вторых, информация о состоянии устройств и результатах процесса передачи данных. Информация передается от одних мотов другим по цепочке, и в итоге ближайшие к шлюзу моты сбрасывают ему всю аккумулированную информацию. Если часть мотов выходит из строя, работа сенсорной сети после реконфигурации должна продолжаться. Но в этом случае, естественно, уменьшается число источников информации.
Для выполнения функций на каждый мот устанавливается специализированная операционная система. В настоящее время в большинстве беспроводных сенсорных сетей используется TinyOS — ОС, разработанная в Университете Беркли. TinyOS относится к программному обеспечению с открытым кодом; оно доступно по адресу: www.tinyos.net. TinyOS — это управляемая событиями операционная система реального времени, рассчитанная на работу в условиях ограниченных вычислительных ресурсов. Эта ОС позволяет мотам автоматически устанавливать связи с соседями и формировать сенсорную сеть заданной топологии. Последний релиз TinyOS 2.0 появился в 2006 году.
Важнейшим фактором при работе беспроводных сенсорных сетей является ограниченная емкость батарей, устанавливаемых на моты. Следует учитывать, что заменить батареи чаще всего невозможно. В связи с этим необходимо выполнять на мотах только простейшую первичную обработку, ориентированную на уменьшение объема передаваемой информации, и, что самое главное, минимизировать число циклов приема и передачи данных. Для решения этой задачи разработаны специальные коммуникационные протоколы, наиболее известными из которых являются протоколы альянса ZigBee. Данный альянс (сайт www.zigbee.org) был создан в 2002 году именно для координации работ в области беспроводных сенсорных сетей. В него вошли крупнейшие разработчики аппаратных и программных средств: Philips, Ember, Samsung, IBM, Motorola, Freescale Semiconductor, Texas Instruments, NEC, LG, OKI и многие другие (всего более 200 членов). Корпорация Intel в альянс не входит, хотя и поддерживает его деятельность.
В принципе, для выработки стандарта, в том числе стека протоколов для беспроводных сенсорных сетей, ZigBee использовал разработанный ранее стандарт IEEE 802.15.4, который описывает физический уровень и уровень доступа к среде для беспроводных сетей передачи данных на небольшие расстояния (до 75 м) с низким энергопотреблением, но с высокой степенью надежности. Некоторые характеристики радиопередачи данных для стандарта IEEE 802.15.4 приведены в табл. 1.
Таблица 1. Характеристики радиопередачи данных для IEEE 802.15.4
Полоса частот, МГц |
Нужна ли лицензия |
Географический регион |
Скорость передачи данных, Кбит/с
|
Число каналов |
868,3 |
Нет |
Европа |
20 |
1 |
902-928 |
Нет |
Америка |
40 |
1-10 |
2405-2480 |
Нет |
Весь мир |
250 |
11-26 |
На данный момент ZigBee разработал единственный в этой области стандарт, который подкреплен наличием производства полностью совместимых аппаратных и программных продуктов. Протоколы ZigBee позволяют устройствам находиться в спящем режиме большую часть времени, что значительно продлевает срок службы батареи.
Очевидно, что разработать схемы обмена данными между сотнями и даже тысячами мотов не так-то просто. Наряду с прочим необходимо учесть тот факт, что сенсорные сети работают в нелицензированных частотных диапазонах, поэтому в ряде случаев могут возникать помехи, создаваемые посторонними источниками радиосигналов. Желательно также избегать повторной передачи одних и тех же данных, а кроме того, учитывать, что из-за недостаточной энергоемкости и внешних воздействий моты будут выходить из строя навсегда или на какое-то время. Во всех таких случаях схемы обмена данными должны модифицироваться. Поскольку одной из важнейших функций TinyOS является автоматический выбор схемы организации сети и маршрутов передачи данных, беспроводные сенсорные сети по существу являются самонастраиваемыми.
Чаще всего мот должен иметь возможность самостоятельно определить свое местоположение, по крайней мере по отношению к тому другому моту, которому он будет передавать данные. То есть сначала происходит идентификация всех мотов, а затем уже формируется схема маршрутизации. Вообще все моты — устройства стандарта ZigBee — по уровню сложности разбиваются на три класса. Высший из них — координатор — управляет работой сети, хранит данные о ее топологии и служит шлюзом для передачи данных, собираемых всей беспроводной сенсорной сетью, для дальнейшей обработки. В сенсорных сетях обычно используется один координатор. Средний по сложности мот является маршрутизатором, то есть может принимать и передавать данные, а также определять направления передачи. И наконец, самый простой мот может лишь передавать данные ближайшему маршрутизатору. Таким образом, получается, что стандарт ZigBee поддерживает сеть с кластерной архитектурой (рис. 2). Кластер образуют маршрутизатор и простейшие моты, у которых он запрашивает сенсорные данные. Маршрутизаторы кластеров ретранслируют данные друг другу, и в конечном счете данные передаются координатору. Координатор обычно имеет связь с IP-сетью, куда и направляются данные для окончательной обработки.
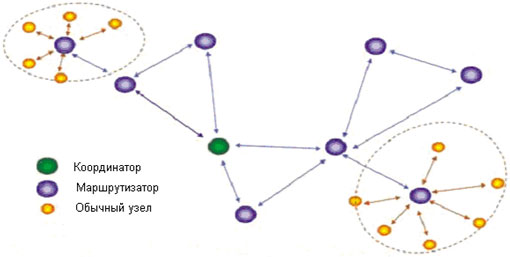
Рис. 2
В России тоже проводятся разработки, связанные с созданием беспроводных сенсорных сетей. Так, компания «Высокотехнологичные системы» предлагает свою аппаратно-программную платформу MeshLogic для построения беспроводных сенсорных сетей (сайт www.meshlogic.ru). Основным отличием этой платформы от ZigBee является ориентация на построение одноранговых ячеистых сетей (рис. 3). В таких сетях функциональные возможности каждого мота одинаковы. Возможность самоорганизации и самовосстановления сетей ячеистой топологии позволяет в случае выхода части мотов из строя спонтанно формировать новую структуру сети. Правда, в любом случае необходим центральный функциональный узел, принимающий и обрабатывающий все данные, или шлюз для передачи данных на обработку узлу. Спонтанно создаваемые сети часто называют латинским термином Ad Hoc, что означает «для конкретного случая».
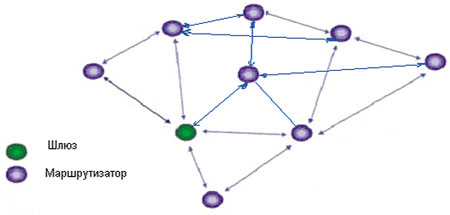
Рис. 3
В сетях MeshLogic каждый мот может выполнять ретрансляцию пакетов, то есть по своим функциям напоминает маршрутизатор ZigBee. Сети MeshLogic являются в полной мере самоорганизуемыми: никакого узла-координатора не предусмотрено. В качестве радиочастотных приемопередатчиков в MeshLogic могут использоваться различные устройства, в частности Cypress WirelessUSB, которые так же, как и устройства стандарта ZigBee, работают в диапазоне частот 2,4... 2,4835 ГГц. Следует отметить, что для платформы MeshLogic существуют только нижние уровни стека протоколов. Считается, что верхние уровни, в частности сетевой и прикладной, будут создаваться под конкретные приложения. Конфигурации и основные параметры двух мотов MeshLogic и одного мота стандарта ZigBee приведены в табл. 2.
Таблица 2. Основные характеристики мотов различных производителей
Параметры |
ML-Node-Z |
ML-Node-U |
ZigBit |
Микроконтроллер |
|||
Процессор |
Texas Instruments MSP430 |
ATmega1281 |
|
Тактовая частота |
От 32,768 кГц до 8 МГц |
4 МГц |
|
Оперативная память |
10 Кбайт |
8 Кбайт |
|
Flash-память |
48 Кбайт |
128 Кбайт |
|
Приемопередатчик |
|||
Тип |
IEEE 802.15.4 |
Cypress WirelessUSBTM LP |
IEEE 802.15.4 |
Диапазон частот |
2400-2483,5 МГц |
2400-2483,5 МГц |
|
Скорость передачи данных |
250 Кбит/с |
От 15,625 до 250 Кбит/с |
250 Кбит/с |
Выходная мощность |
От –24 до 0 дБм |
От –35 до 4 дБм |
От –28 до 3 дБм |
Чувствительность |
–95 дБм |
–93 дБм |
–101 дБм |
Антенна |
Чип |
1 или 2 чипа |
|
Внешние интерфейсы |
|||
АЦП |
12-разрядный, 7 каналов |
10-разрядный, 3 канала |
|
Цифровые интерфейсы |
I2C/SPI/UART/USB |
I2C/SPI/UART/IRQ/JTAG |
|
Другие параметры |
|||
Напряжение питания |
От 0,9 до 6,5 В |
От 1,8 до 3,6 В |
|
Размеры |
44x33x10 мм |
19x14x3 мм |
|
Температурный диапазон |
От –40 до 85 °C |
От 0 до 70 °C |
От 0 до 85 °C |
Отметим, что интегрированных сенсорных датчиков на этих платах нет.
Укажем, что в первую очередь отличает беспроводные сенсорные сети от обычных вычислительных (проводных и беспроводных) сетей:
- полное отсутствие каких бы то ни было кабелей — электрических, коммуникационных и т.д.;
- возможность компактного размещения или даже интеграции мотов в объекты окружающей среды;
- надежность как отдельных элементов, так и, что более важно, всей системы в целом; в ряде случаев сеть может функционировать при исправности только 10-20% сенсоров (мотов);
- отсутствие необходимости в персонале для монтажа и технического обслуживания.
Сенсорные сети могут быть использованы во многих прикладных областях. Беспроводные сенсорные сети — это новая перспективная технология, и все связанные с ней проекты в основном находятся в стадии разработки. Укажем основные области применения данной технологии:
- системы обороны и обеспечение безопасности;
- контроль окружающей среды;
- мониторинг промышленного оборудования;
- охранные системы;
- мониторинг состояния сельскохозяйственных угодий;
- управление энергоснабжением;
- контроль систем вентиляции, кондиционирования и освещения;
- пожарная сигнализация;
- складской учет;
- слежение за транспортировкой грузов;
- мониторинг физиологического состояния человека;
- контроль персонала.
Из достаточно большого числа примеров использования беспроводных сенсорных сетей выделим два. Наиболее известным является, пожалуй, развертывание сети на борту нефтяного танкера компании ВР. Там с помощью сети, построенной на основе оборудования Intel, осуществлялся мониторинг состояния судна с целью организации его профилактического обслуживания. Компания BP проанализировала, может ли сенсорная сеть работать на борту судна в условиях экстремальных температур, высокой вибрации и значительного уровня радиочастотных помех, имеющихся в некоторых помещениях судна. Эксперимент прошел успешно, несколько раз автоматически осуществлялись реконфигурация и восстановление работоспособности сети.
Примером еще одного реализованного пилотного проекта является развертывание сенсорной сети на базе военно-воздушных сил США во Флориде. Система продемонстрировала хорошие возможности по распознаванию различных металлических объектов, в том числе движущихся. Применение сенсорной сети позволило обнаруживать проникновение людей и автомобилей в контролируемую зону и отслеживать их перемещения. Для решения этих задач использовались моты, оснащенные магнитоэлектрическими и температурными датчиками. В настоящее время масштабы проекта расширяются, и беспроводная сенсорная сеть устанавливается уже на полигоне размером 10 000x500 м. Соответствующее прикладное программное обеспечение разрабатывается несколькими американскими университетами.








